{kind=link}
Splunk Enterprise stores indexed data in buckets, which are directories containing both the data and index files into the data. An index typically consists of many buckets, organized by age of the data.
The indexer cluster replicates data on a bucket-by-bucket basis. The original bucket copy and its replicated copies on other peer nodes contain identical sets of data, although only searchable copies also contain the index files.
You are viewing: Which Component Of A Bucket Stores Raw Event Data
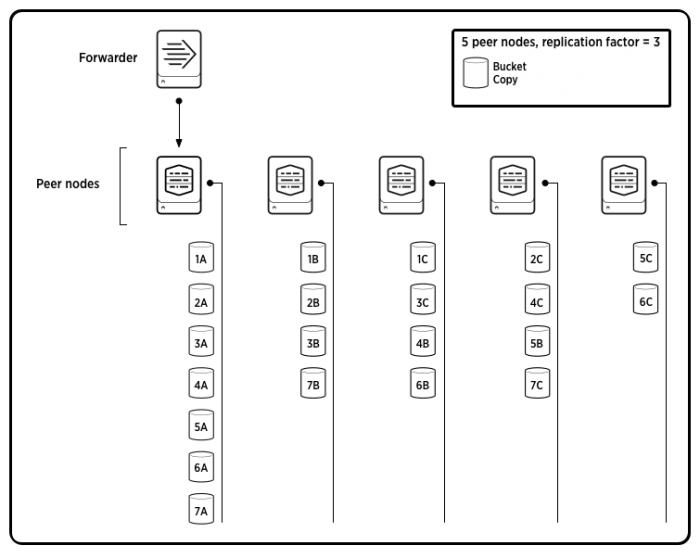
In a cluster, copies of buckets originating from a single source peer can be spread across many target peers. For example, if you have five peers in your cluster and a replication factor of 3 (a typical scenario for horizontal scaling), the cluster will maintain three copies of each bucket (the original copy on the source peer and replicated copies on two target peers). Each time the source peer starts a new hot bucket, the manager node gives the peer a new set of target peers to replicate data to. Therefore, while the original copies will all be on the source peer, the replicated copies of those buckets will be randomly spread across the other peers.This behavior is not configurable. The one certainty is that you will never have two copies of the same bucket on the same peer. In the case of a multisite cluster, you can also configure the site location of the replicated copies, but you still cannot specify the actual peer location.
The following diagram shows the scenario just described – five peers, a replication factor of 3, and seven original source buckets, with their copies spread across all the peers. To reduce complexity, the diagram only shows the buckets for data originating from one peer. In a real-life scenario, most, if not all, of the other peers would also be originating data and replicating it to other peers on the cluster.
In this diagram, 1A is a source bucket. 1B and 1C are copies of that bucket. The diagram uses the same convention with 2A/B/C, 3A/B/C, and so on.
You need a good grasp of buckets to understand cluster architecture. The rest of this section describes some bucket concepts of particular importance for a clustered deployment. For a thorough introduction to buckets, read “How the indexer stores indexes”.
Data files
There are two key types of files in a bucket:
- The processed external data in compressed form (rawdata)
- Indexes that point to the rawdata (index files, also referred to as tsidx files)
Buckets contain a few other types of files as well, but these are the ones that are most important to understand.
Rawdata is not actually “raw” data, as the term might be defined by a dictionary. Rather, it consists of the external data after it has been processed into events. The processed data is stored in a compressed rawdata journal file. As a journal file, the rawdata file, in addition to containing the event data, contains all information necessary to generate the associated index files, if they are missing.
All bucket copies, both searchable and non-searchable, contain rawdata files. Searchable copies also contain index files.
When a peer node receives a block of data from a forwarder, it processes the data and adds it to the rawdata file in its local hot bucket. It also indexes it, creating the associated index files. In addition, it streams copies of just the processed rawdata to each of its target peers, which then adds it to the rawdata file in its own copy of the bucket. The rawdata in both the original and the replicated bucket copies are identical.
If the cluster has a search factor of 1, the target peers store only the rawdata in the bucket copies. They do not generate index files for the data. By not storing the index files on the target peers, you limit storage requirements. Because the rawdata is stored as a journal file, if the peer maintaining the original, fully indexed data goes down, one of the target peers can step in and generate the indexes from its copy of the rawdata.
If the cluster has a search factor greater than 1, some or all of the target peers also create index files for the data. For example, say you have a replication factor of 3 and a search factor of 2. In that case, the source peer streams its rawdata to two target peers. One of those peers then uses the rawdata to create index files, which it stores in its copy of the bucket. That way, there will be two searchable copies of the data (the original copy and the replicated copy with the index files). As described in “Search factor”, this allows the cluster to recover more quickly in case of peer node failure. For more information on searchable bucket copies, see “Bucket searchability” later in this topic.
See these topics for more information on bucket files:
- For information on how bucket files get regenerated when a peer goes down, read “What happens when a peer node goes down”.
- For information on the relative sizes of rawdata and index files, read “Storage considerations”.
Bucket stages
As a bucket ages, it rolls through several stages:
- hot
- warm
- cold
- frozen
For detailed information about these stages, read “How the indexer stores indexes”.
Read more : Which Of The Following Best Describes The Concert Of Europe
For the immediate discussion of cluster architecture, you just need a basic understanding of these bucket stages. A hot bucket is a bucket that’s still being written to. When an indexer finishes writing to a hot bucket (for example, because the bucket reaches a maximum size), it rolls the bucket to warm and begins writing to a new hot bucket. Warm buckets are readable (for example, for searching) but the indexer does not write new data to them. Eventually, a bucket rolls to cold and then to frozen, at which point it gets archived or deleted.
There are a couple other details that are important to keep in mind:
- Hot/warm and cold buckets are stored in separately configurable locations.
- The filename of a warm or cold bucket includes the time range of the data in the bucket. For detailed information on bucket naming conventions, read “What the index directories look like”.
- Searches occur across hot, warm, and cold buckets.
- The conditions that cause buckets to roll are configurable, as described in “Configure index storage”.
- For storage hardware information, such as help on estimating storage requirements, read “Storage considerations”.
Bucket searchability and primacy states
A copy of a bucket is either searchable or non-searchable. Since a cluster can maintain multiple searchable copies of a bucket, the cluster needs a way to identify which copy participates in a search. To handle this, clusters use the concept of primacy. A searchable bucket copy is either primary or non-primary.
A bucket copy is searchable if it contains index files in addition to the rawdata file. The peer receiving the external data indexes the rawdata and also sends copies of the rawdata to its peers. If the search factor is greater than 1, some or all of those peers will also generate index files for the buckets they’re replicating. So, for example, if you have a replication factor of 3 and a search factor of 2 and the cluster is complete, the cluster will contain three copies of each bucket. All three copies will contain the rawdata file, and two of the copies (the copy on the source peer and one of the copies on the target peers) will also contain index files and therefore be searchable. The third copy will be non-searchable, but it can be made searchable if necessary. The main reason that a non-searchable copy gets made searchable is because a peer holding a searchable copy of the bucket goes down.
A primary copy of a bucket is the searchable copy that participates in a search. A single-site valid cluster has exactly one primary copy of each bucket. That way, one and only one copy of each bucket gets searched. If a node with primary copies goes down, searchable but non-primary copies on other nodes can immediately be designated as primary, thus allowing searches to continue without any need to first wait for new index files to be generated.
Note: In the case of a multisite cluster, a valid cluster is a cluster that has a set of primary copies for each site that supports search affinity. In search affinity, search heads perform searches across the peers on their local site. This requires that each site have its own set of primary buckets.
Initially, the copy of the bucket on the peer originating the data is the primary copy, but this can change over time. For example, if the peer goes down, the manager node reassigns primacy from any primary copies on the downed peer to corresponding searchable copies on remaining peers. For more information on this process, read “What happens when a peer node goes down”.
Primacy reassignment also occurs when the manager rebalances the cluster, in an attempt to achieve a more even distribution of primary copies across the set of peers. Rebalancing occurs under these circumstances:
- A peer joins or rejoins a cluster.
- A manager node rejoins the cluster.
- You manually invoke the rebalance_primaries REST endpoint on the manager node.
See “Rebalance the indexer cluster primary buckets” for details.
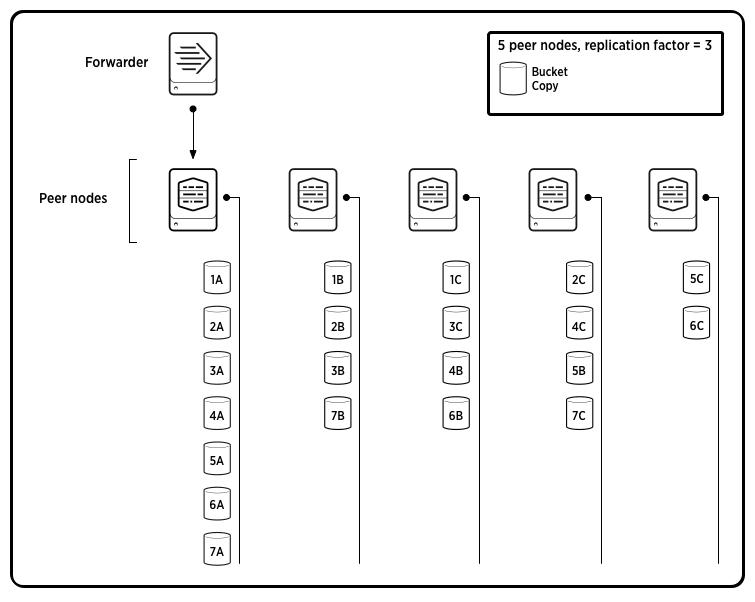
The following diagram shows buckets spread across all the peers, as in the previous diagram. The cluster has a replication factor of 3 and a search factor of 2, which means that the cluster maintains two searchable copies of each bucket. Here, the copies of the buckets on the source peer are all primary (and therefore also searchable). The buckets’ second searchable (but non-primary) copies are spread among most of the remaining peers in the cluster.
The set of primary bucket copies define a cluster’s generation, as described in the next section.
Generations
A generation identifies which copies of a cluster’s buckets are primary and therefore will participate in a search.
Note: The actual set of buckets that get searched also depends on other factors such as the search time range. This is true for any indexer, clustered or not.
The generation changes over time, as peers leave and join the cluster. When a peer goes down, its primary bucket copies get reassigned to other peers. The manager also reassigns primaries under certain other circumstances, in a process known as “cluster rebalancing”.
Here is another way of defining a generation: A generation is a snapshot of a valid state of the cluster; “valid” in the sense that every bucket on the cluster has exactly one primary copy.
Read more : Which Best Illustrates A Result Of Natural Selection
All peers that are currently registered with the manager participate in the current generation. When a peer joins or leaves the cluster, the manager creates a new generation.
Note: Since the process of reassigning primary to new bucket copies is not instantaneous, the cluster might quickly go through a number of generations while reassigning primacy due to an event such as a downed peer, particularly in the case where numerous primaries were residing on the downed peer.
The generation is a cluster-wide attribute. Its value is the same across all sites in a multisite cluster.
How cluster nodes use the generation
Here is how the various cluster nodes use generation information:
- The manager creates each new generation, and assigns a generation ID to it. When necessary, it communicates the current generation ID to the peers and the search head. It also keeps track of the primary bucket copies for each generation and on which peers they are located.
- The peers keep track of which of their bucket copies are primary for each generation. The peers retain primary information across multiple generations.
- For each search, the search head uses the generation ID that it gets from the manager to determine which peers to search across.
When the generation changes
The generation changes under these circumstances:
- The manager comes online.
- A peer joins the cluster.
- A peer goes down, either intentionally (through the CLI offline command) or unintentionally (by crashing). When a peer goes down, the manager reassigns primacy from bucket copies on the downed node to searchable copies of the same buckets on the remaining nodes and creates a new generation.
- Whenever rebalancing of the primary copies occurs, such as when you manually hit the rebalance_primaries REST endpoint on the manager. For information on rebalancing, see “Rebalance the indexer cluster primary buckets”.
- When the manager resolves certain bucket anomalies.
The manager does not create a new generation merely when a bucket rolls from hot to warm, thus causing a new hot bucket to get created (unless the bucket rolled for one of the reasons listed above). In that situation, the set of peers doesn’t change. The search head only needs to know which peers are part of the generation; that is, which peers are currently participating in the cluster. It does not need to know which bucket copies on a particular peer are primary; the peer itself keeps track of that information.
How the generation is used in searches
The search heads poll the manager for the latest generation information at regular intervals. When the generation changes, the manager gives the search heads the new generation ID and a list of the peers that belong to that generation. Each search head, in turn, gives the peers the ID whenever it initiates a search. The peers use the ID to identify which of their buckets are primary for that search.
Usually, a search occurs over the most recent generation of primary bucket copies. In the case of long-running searches, however, it is possible that a search could be running across an earlier generation. This situation typically occurs because a peer went down in the middle of the search. This allows the long-running search to complete, even though some data might be missing due to the downed peer node. The alternative would be to start the search over again, which you can always do manually if necessary.
Why a downed peer causes the generation to change
The reason that a downed peer causes the manager to create a new generation is because, when a peer goes down, the manager reassigns the downed peer’s primary copies to copies on other peers. A copy that was not primary for a previous generation becomes primary in the new generation. By knowing the generation ID associated with a search, a peer is able to determine which of its buckets are primary for that search.
For example, the diagram that follows shows the same simplified version of a cluster as earlier, after the source node holding all the primary copies has gone down and the manager has directed the remaining peers in fixing the buckets. First, the manager reassigned primacy to the remaining searchable copy of each bucket. Next, it directed the peers to make their non-searchable copies searchable, to make up for the missing set of searchable copies. Finally, it directed the replication of a new set of non-searchable copies (1D, 2D, etc.), spread among the remaining peers.
Even though the source node went down, the cluster was able to fully recover both its complete and valid states, with replication factor number (3) of total bucket copies, search factor number (2) of searchable bucket copies, and exactly one primary copy of each bucket. This represents a different generation from the previous diagram, because primary copies have moved to different peers.
Note: This diagram only shows the buckets originating from one of the peers. A more complete version of this diagram would show buckets originating from several peers as they have migrated around the cluster.
How the cluster handles frozen buckets
In the case of a standalone indexer, when a bucket rolls to frozen, the indexer deletes it from its colddb directory. Depending on its retirement policy, the indexer might copy it to an archive directory before deleting it. See “Archive indexed data.”
In the case of an indexer cluster, when a peer freezes a copy of a bucket, it notifies the manager. The manager then stops doing fix-ups on that bucket. It operates under the assumption that the other peers will eventually freeze their copies of that bucket as well. If the freezing behavior is determined by the maxTotalDataSizeMB attribute, which limits the maximum size of an index, it can take some time for all copies of the bucket to freeze, as an index will typically be a different size on each peer. Therefore, the index can reach its maximum size on one peer, causing the oldest bucket to freeze, even though the index is still under the limit on the other peers.
Note: In 6.3, a change was made in how the cluster responds to frozen primary bucket copies, in order to prolong the time that a bucket remains available for searching:
- In a pre-6.3 cluster, when a primary copy freezes, the cluster does not attempt to reassign the primary to any other remaining searchable copy. Searching on a bucket ceases once the primary is frozen.
- In 6.3 and later, when a primary copy freezes, the cluster reassigns the primary to another searchable copy, if one exists. Searching then continues on that bucket with the new primary copy. When that primary also freezes, the cluster attempts to reassign the primary yet again to another searchable copy. Once all searchable copies of the bucket have been frozen, searching ceases on that bucket.
In both pre-6.3 and post-6.3, when a copy freezes, the cluster does not perform fix-up on the bucket; that is, it does not attempt to create a new copy,or to convert a non-searchable copy to searchable, to meet replication and search factors for the bucket.
Source: https://t-tees.com
Category: WHICH